米国連邦政府で障害者政策の中枢を担うアクセス委員会が、自動走行車の概念設計に関する公開フォーラムの第2セッションを3月25日に開催した。
IGphotography/iStock
セッションの冒頭では、障害者雇用政策局の次官補代理であるJennifer Sheehyが、障害者の雇用の成功と自立生活の最も重要な要素の1つとして交通の役割を強調した。
その後、関連する研究が紹介された。発表資料はこちらから入手できる。
アクセス委員会のスペシャリストであるScott Windleyは車いす利用者の自動車利用に関わる現行基準を、乗車、車内スペース、固定のそれぞれについて紹介した。
Bryan Brilhartは車いす利用者の乗車を支援するロボットParaliftを発表した。ロボットは車いすを車に移すために使うスロープ(プラットフォーム)や道路の縁石などを検出して、安全な乗車を助けるものだ。Kathleen D. Klinichらは、車内での車いすの固定方法と安全性に関する研究プロジェクトについて話した。車いすを利用しない人々と同等の安全性が確保されるのが目標である。
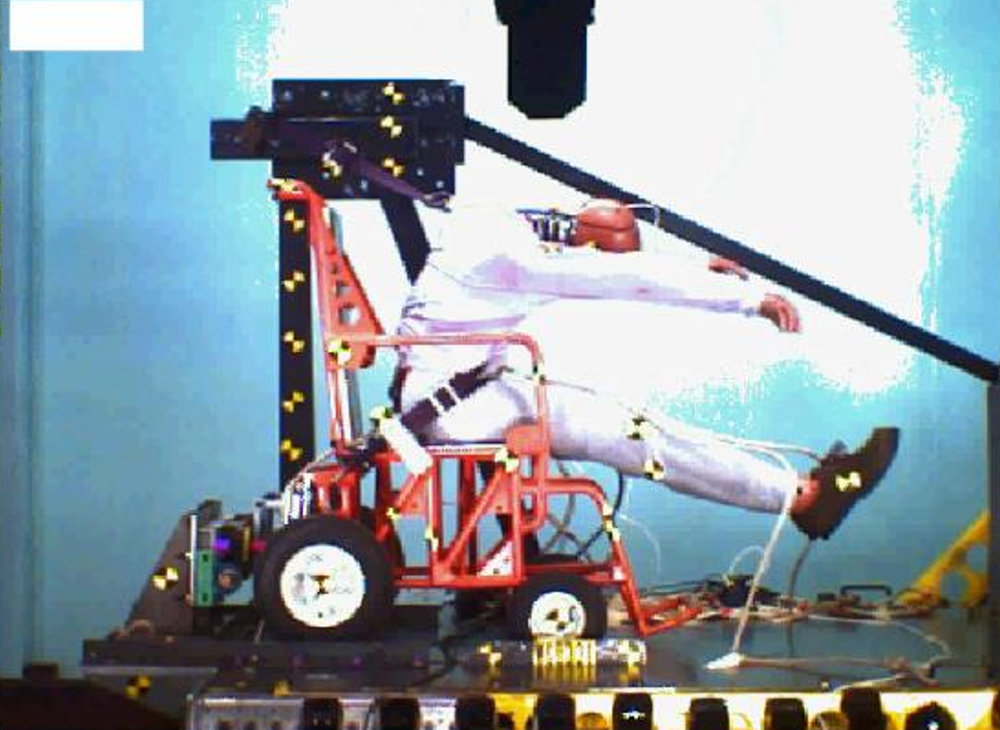
車いす利用者のダミーを使った衝突実験(米国アクセス委員会サイトより)
Jordana Maiselは、バス車両に設置された車いすスペースがどのように利用しやすく、またどのように利用しにくいかについて、人間工学に基づく実験結果を紹介した。わが国でもバスには車いす席があるが、その使いやすさについて研究されているのだろうか。
次のセッションは4月7日で、感覚障害または認知障害のある乗客への対応が議論される。
前の記事にも書いたが、誰でもが利用できる自動走行車の要件を定めようというアクセス委員会の動きは、多様な人々の共生を目指すアメリカならではのものだ。また、将来、要件に沿った自動走行車が市中に提供されるようになれば、競争力を持つだろう。
わが国でも同様の議論が起きるように期待する。