PhonlamaiPhoto/iStock
著者はこれまでに都市部でドローン飛行をさせるために様々な試みを行ってきた。
都市部におけるドローン飛行には,国土交通省のみならず,その飛行ルート直下の土地所有者等に許可を取る必要があり,都市上空の横断的な飛行は容易ではないため,ドローンの垂直移動のみで実現可能な建物外壁点検を中野サンプラザ等で行ってきた(以後、詳述)。
さらにドローンの可能性を引き出すためには都市部においても横断飛行し、物流への利活用が必要と考える。そこで著者らは都市部においてはドローンの飛行ルートとして、河川空間を活用することがよいのではないかと研究を進め、以下の論文として、まとめさせていただいた。本稿ではその内容をより詳細を説明させていただく.
加藤拓磨,國谷岳,手計太一,向山公人,近藤建斗:河川空間を活用したドローン物流を実現するために必要な空間情報の検討,土木学会論文集,Vol.80,No.16,pp.063_1-063_7,2023.
1. はじめに
2022年12月5日、ドローン、ラジコン機、農薬散布用ヘリコプター等を含めた無人航空機の改正航空法が施行された。これにより機体認証、無人航空操縦車技能証明、運航に係るルールが整備され、「有人地帯の目視外飛行」(レベル4)が可能となった。また「無人地帯での目視外飛行」(レベル3)は、必要な認証があれば、個別の許可承認なく飛行できるようになった。
有人地帯とは総務省統計局が定める人口集中地区(DID=Densely Inhabited Districts)としており、原則として人口密度が1㎢当たり4,000人以上の基本単位区等が市区町村の境域内で互いに隣接していることなどと定義されている。目視外飛行とは操縦者の視界内にドローンが存在しない状態で操縦、つまりドローン搭載のカメラ映像を見ながら操縦することを意味する。
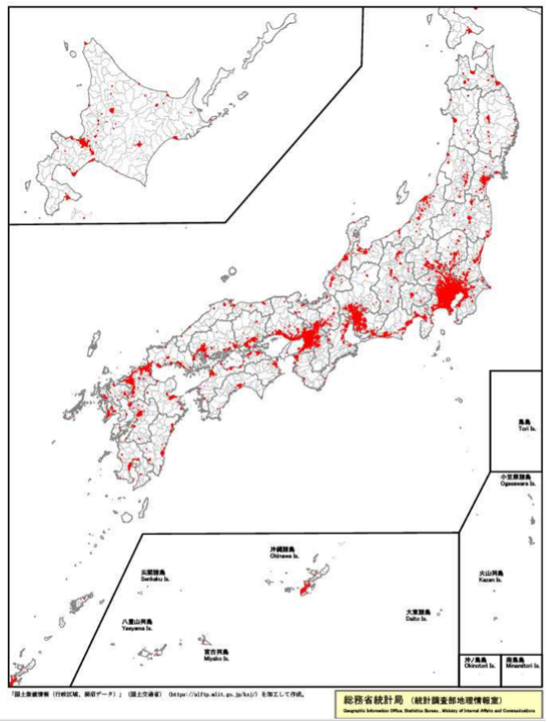
図1 人口集中地区(国土交通省航空局:無人航空機(ドローン、ラジコン機等)の安全な飛行のためのガイドライン)
法律が改正され、無人地帯である海上、山岳部においては様々な試みが積極的に行われているが、第三者の土地の上空でドローンを飛行させる場合、土地所有者の同意・承諾が必要であるため、ドローンが都市上空を航行することは非常に困難である。また都心部では様々な電波の放出、ビル風などの障害がある上、ドローンに対する社会受容性が低いため、状況によっては警察に通報される可能性があることなどを前提に実証実験を進める必要がある。

図2 都市部における理想のドローン飛行横断イメージ
そこで、著者らは中野サンプラザ等でドローンを活用した建物点検の実証実験を行った。
二村らは同実験で建物の屋上及び地上の2点に強度のあるワイヤラインを張り、そのライン上にドローンを係留する装置を使用した。この装置はドローンの逸脱を防止し、離着陸位置上にドローンが墜落するため危険個所を特定できる特徴があり、極めて安全にドローンを活用した建物の外壁の撮影を可能とした。この手法は建築基準法12条点検に準拠し、2023年1月より「ドローン建築物調査安全飛行技能者コース」として座学、実技の3日間の講習で技術の習得が可能となり、科学技術の社会実装の一端を担った。
詳細は「ドローン、レベル4飛行突!!:中野区での飛行実験実施の様子」に掲載。
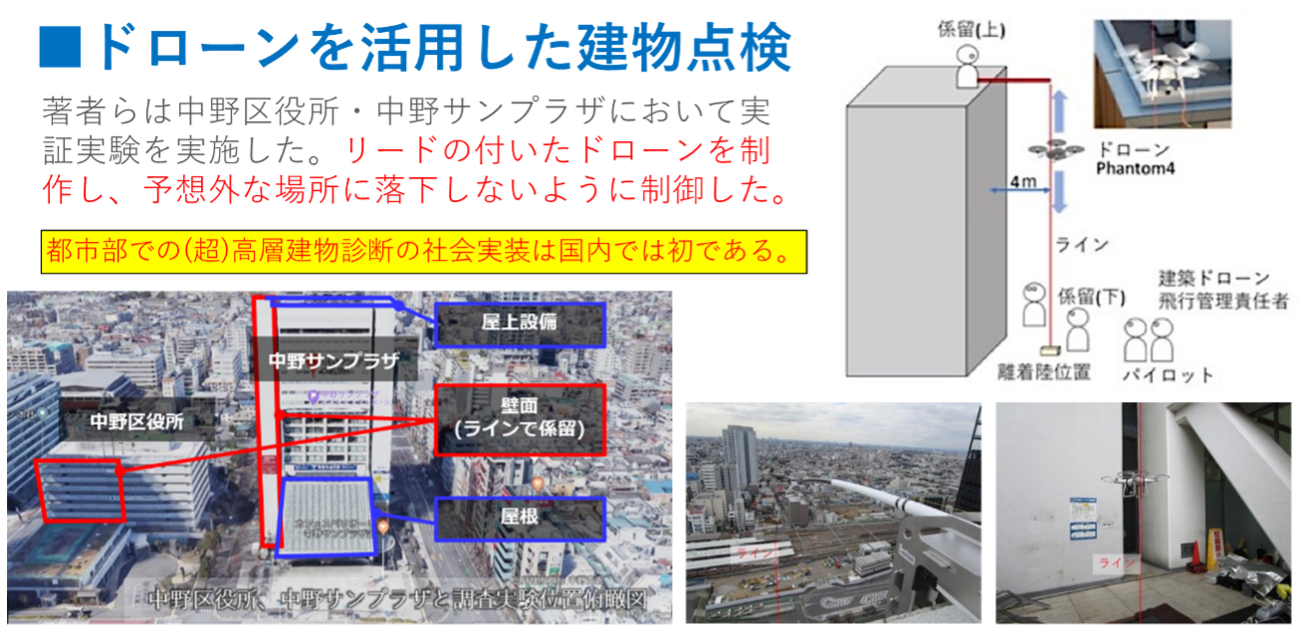
図3 ドローンを活用した建物点検の社会実験概要
都市部におけるドローンの活動範囲の拡大が適うとすれば、運送事業としての物流を実現できる。そこで、著者らは都市部におけるドローン飛行の空路のさらなる拡大を目的に、ドローン飛行における様々なリスクを低減できる河川空間の活用を検討している。
国土交通省においても2022年度に河川上空を飛行ルートとして活用する際のルールづくりの必要性や支援策等の検討に向けて「河川上空を活用したドローン物流の更なる活性化に向けた実証実験」を実施した。全国18箇所、22団体が参加し、現地実証、意見交換会が実施され、国土交通省においてマニュアル作成・支援策等へ反映がなされている。
著者らも中央大学・東京都・中野区・国際航業株式会社でTOKYOドローンウェイ研究会を発足し、同実証実験に参画した。同研究会ではドローンに対する社会受容性の低さを鑑みて、ドローンの飛行は現状として河道内、橋桁より下をルートとする検証を進めている。
数多の団体がドローン物流の実現に向けて実証実験を行っている。国土交通省は2023年3月にドローンを活用した荷物等配送に関するガイドラインVer.4.0を公表し、国内事例を整理している。イベントとしての事業、過疎地における実験、災害時における運用などが行われているが、都市部における運送事業をターゲットとした事例は見当たらない。
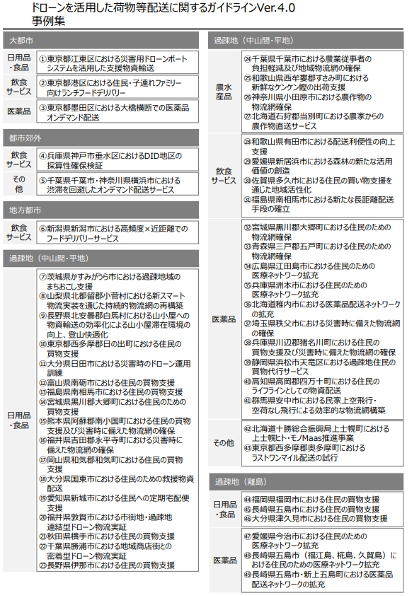
図4 ドローン活用した荷物等配送の事例集(ドローンを活用した荷物等配送に関するガイドラインVer.4.0)
ドローンによる物流の実現に向けては多くの課題があるため、本稿では河川空間、特に都市河川における飛行ルート確立のために必要な諸条件を整理し、検証した。
2. 河川におけるドローン物流に資する情報
(1) ドローン物流に関する空間情報
国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO)が行ったドローン運航のビジネスの検証では、前提として自動・自律飛行するドローンを使用し、一人のオペレーターが5台のドローンの運行管理をすることとし、オペレーターの時給2000円、配送サービス単価700円と設定することでサービスを持続的に継続できる収支構造との試算である。ドローン物流で利益を生むには自動・自律飛行が必須条件となり、そのためには空間情報を整備する必要がある。
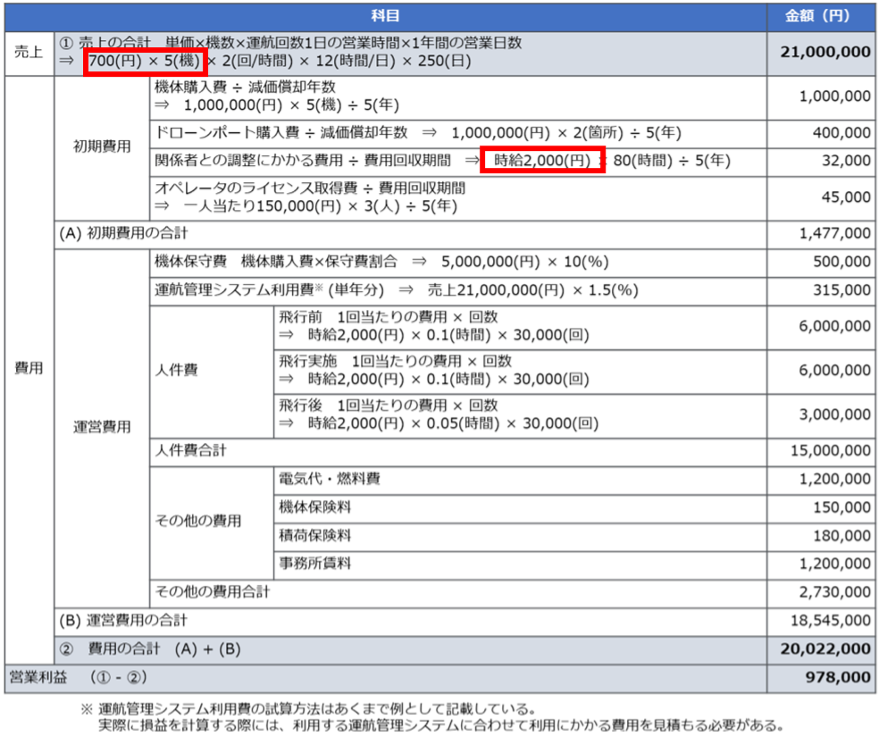
図5 ドローン運航のビジネスの検証(国立研究開発法人新エネルギー・産業技術総合開発機構:運航管理システムを使ったドローン運航ビジネスの姿、ロボット・ドローンが活躍する省エネルギー社会の実現プロジェクト報告書 2022.)
ドローン用地理空間情報に関する国際規格に関しては、2021年9月、ゼンリン、日本気象協会、三菱総合研究所が提案を進めていたドローン用地理空間情報に関する国際規格「ISO 23629-7:2021 UAS traffic management (UTM)- Part7:Data model for spatial data」が、国際標準化機構(ISO)より発行された。
これは地理空間情報データモデルを、(1)地形や離着陸エリアなどを示す「地図情報」、(2)ドローン飛行において障害物となる建物や鉄塔などの「障害物情報」、(3)飛行禁止エリアやドローンの飛行ルートなどを示す「仮想データ」、(4)気象情報や他の航空機の位置など時間的に変化する「動的データ」の4階層で構成するものである。
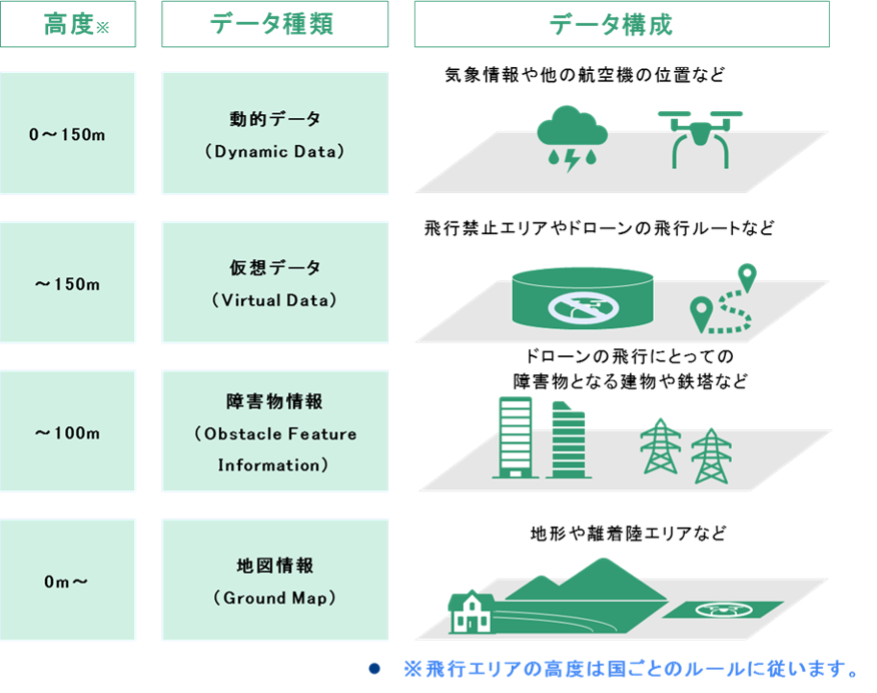
図6 地理空間情報データモデルの概念図 ((株)ゼンリン、(一財)日本気象協会)
独立行政法人情報処理推進機構の報告書によると、ドローンの運用コンセプト(ConOps:Concept of Operation)づくりの国際的な取り組みとして、米国のFAA(Federal Aviation Administration)が発行するUTM(Unmanned Aircraft System Traffic Management System)、欧州のCORUSプロジェクト(Concept of Operations for EuRopean UTM Sys-tems)が発行するU-spaceがある。
それぞれ2018年からルールが策定され、考え方はそれぞれ異なるものの、双方とも空域を高さ方向、時間を含めセグメント化した4次元ブロックを作成し、オペレーションが重複する可能性を減少させることを検討しており、3次元の空間情報は必要不可欠である。
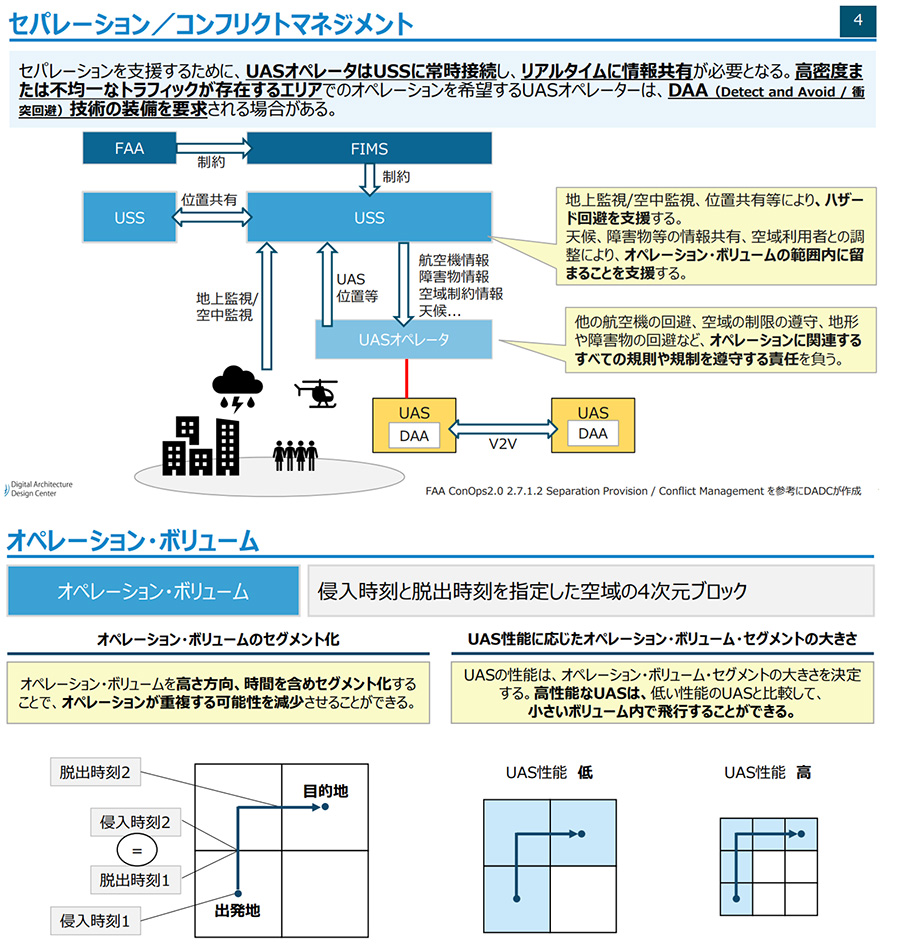
図7 ドローンの運用コンセプトづくり(国際的取組)の一例
(独立行政法人情報処理推進機構(IPA)、デジタルアーキテクチャ・デザインセンター(DADC)自律移動ロボットプログラム空モビリティプロジェクト:ドローンの運用コンセプト(ConOps)に関する調査報告,2022年12月)
経済産業省では、空間情報の管理と空間定義に関する統一的な基準、システム・データを繋ぐ汎用的な連携基盤が存在しないことが現状の課題と認識しており、人・機械が認識可能な3次元グリッドを整備し、様々な地理空間情報やベースレジストリを仮想空間上に付与された一意の識別子(ID)と紐付け、相互に参照可能とするシステムの整備を検討している。
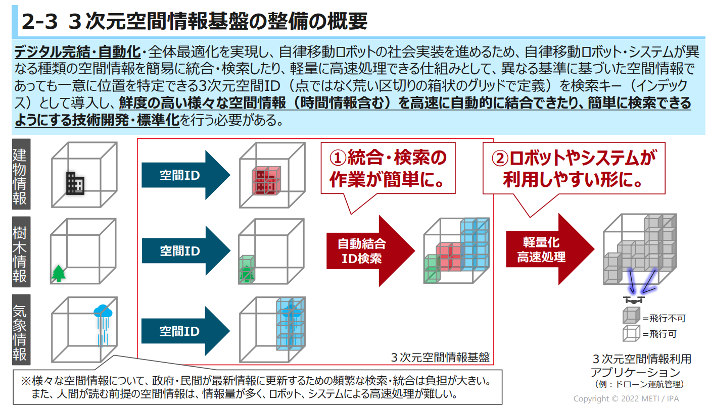
図8 国内の空間情報の管理と空間定義
(経済産業省・デジタルアーキテクチャ・デザインセンター(DADC):3次元空間情報基盤アーキテクチャ中間報告書、2022年5月)
河川に関する空間情報は標高と河川のラインデータを検討するに留まっている。全国を網羅する標高データとしては国土地理院の数値標高モデル5mDEMが最高の解像度であり、ラインデータは河川基盤地図、数値地図、河川管内図等から判読される1/25000レベルの河川データ等から取得された国土数値情報河川データが想定され、それら河川基盤地図等の原典資料と比較し、水平位置17.5mを超える誤差をエラーとしている。河川の規模、特に都市河川においては許容できない誤差を含んでいる。
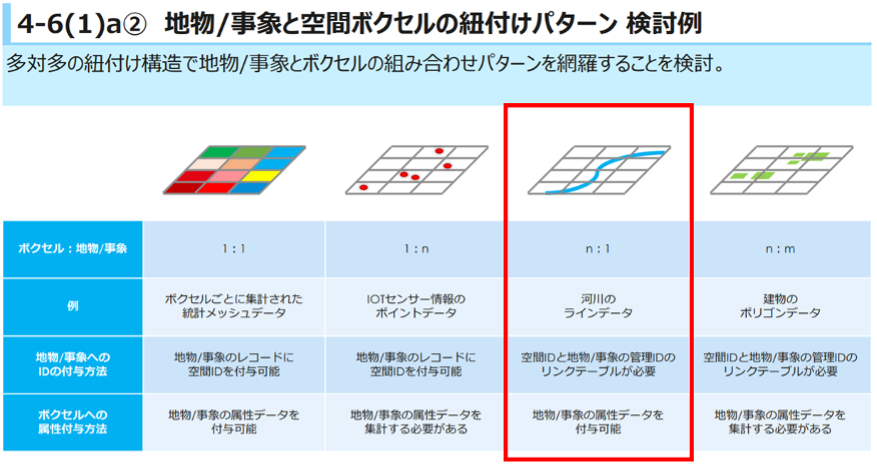
図9 空間情報の検討例
(経済産業省・デジタルアーキテクチャ・デザインセンター(DADC):3次元空間情報基盤アーキテクチャ中間報告書、2022年5月)
(2) ドローンの位置情報に関する技術
ドローンの位置を測定する代表的な方法として、GPS(Global Positioning System)方式、RTK(Real Time Kinematic)方式が挙げられる。一般的にGPSの水平誤差は最大10m程度、RTKは数㎝といわれている。本研究で使用したドローンはGPS搭載機であるが、2か所の発着場所においてRTKにて補正を行うことで、分析時の誤差を低減させることができる。
この「河川におけるドローン物流に資する情報」背景をまとめると、都市部におけるドローン物流ルートとして河川空間の活用が期待される。ドローン物流のビジネス的成功には自動・自律運転が不可欠であり、その実現のためには〇運行システム、〇空間情報が不可欠となる。本稿では、河川におけるドローン物流を実現するために必要な空間情報について整理を行った。
3. 研究の方法
著者らは河川空間でドローンの飛行が可能な河道を「ドローンウェイ」と定義し、荒川水系の神田川と日本橋川、鶴見川水系の鶴見川と早淵川、神通川水系の神通川を対象河川とし、国土地理院の基盤地図情報数値標高モデル5mDEMおよび横断測量データ等のデータから対象箇所がドローンウェイであるか否かを簡便に判定する手法の検討を行ってきた。
本稿では都市河川である神田川(中野区弥生町付近,杉並区久我山付近)を主な対象とした。本稿で使用するデータを表-1に示す。上記のデータに加え、国土数値情報河川データ、ドローン空撮により生成された河川3次元データ活用、航空写真を比較することで、各データがドローンウェイの空間情報として、利用が可能であるか検証をする。
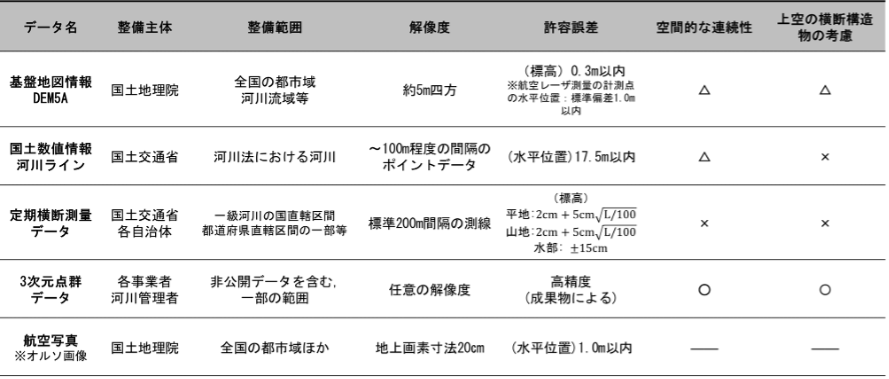
表1 本研究で使用するデータ:5種類
(1) 使用するデータ
a) 国土地理院 基盤地図情報DEM5A
国土地理院の基盤地図情報数値標高モデル5mDEMを入力値とし、河川ドーロンウェイを推定するアルゴリズムを作成した。方法としては、標高データから河川堤防の天端、もしくは河川沿いの道路を検出し、河川形状を推定し、河道断面幅と河道深さを算定する。水平位置がメッシュの規格で指定されているため、座標値に誤差はない。ただし、基となる航空レーザ測量で得られる計測点の水平位置精度は、標準偏差で1.0m以内であり、また標高精度においても0.3mであり、本研究で取り扱うデータとして最も誤差が小さい。
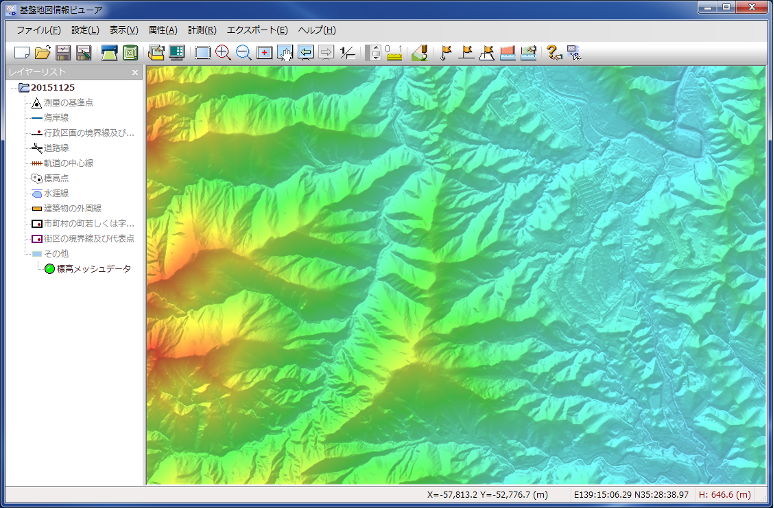
図10 国土地理院 基盤地図情報DEM5A(国土地理院:基盤地図情報数値標高モデルについて)
b) 国土数値情報 河川ライン
上述の 原典資料(河川基盤地図、数値地図、河川管内図等)から判読される1/25000レベルの河川データで、河川中心線の「流路」の接続状況を明示的に示す端点について、位置(点)、標高値等を整備したものである。水平誤差は最大17.5mである。
図11 国土数値情報 河川ライン(国土交通省:国土数値情報「河川データ」)
c) 河川事務所管理 定期横断測量データ
東京都が作成・管理する横断測量データを用いた。同データは断面形状と河口からの距離のみであり、河道空間の端を示す点の水平方向の正確な座標は有していない。流出解析が目的であるため、このようなデータ仕様になっていると考えられる。
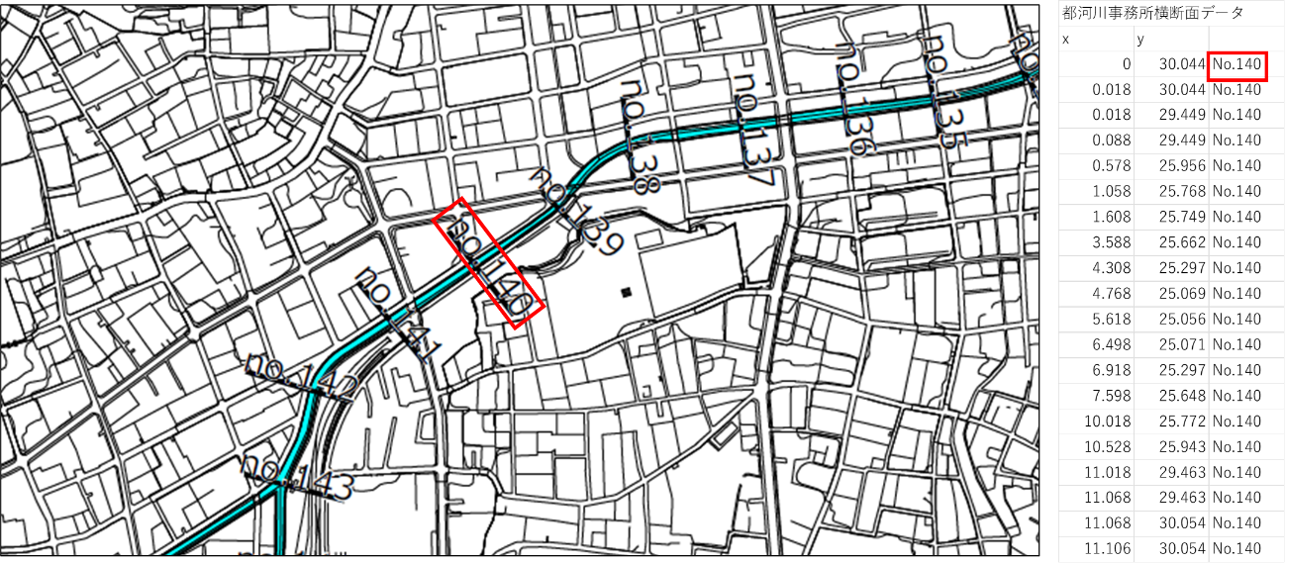
図12 河川事務所管理 定期横断測量データ(断面におけるXY座標データのみ)
d) 3次元点群データ
本研究では、実施区間内の護岸、橋などの施設を対象にドローンによる空中写真撮影を2022年10月6日、東京都中野区弥生町5丁目(中野富士見町駅付近)神田川にて実施した。ドローンを河川中央、河床から約5mの高度を水平に飛行し、得た空撮写真を国際航業株式会社の3次元空間解析クラウドサービス「KKC-3D」および3次元点群モデルビューアツールを用いて視覚化した(図1)。
空撮には米Skydio合同会社製のドローン「Skydio2」、3次元化はStructure from Motion(SfM) を使用した。点群データを整理し、平面図、河道断面データを生成した。水平誤差はRTK補正により、他データよりも非常に小さいものと仮定する。

図13 観測サイト:神田川(東京都中野区中野富士見町駅)

写真1 ドローンによる測量の様子
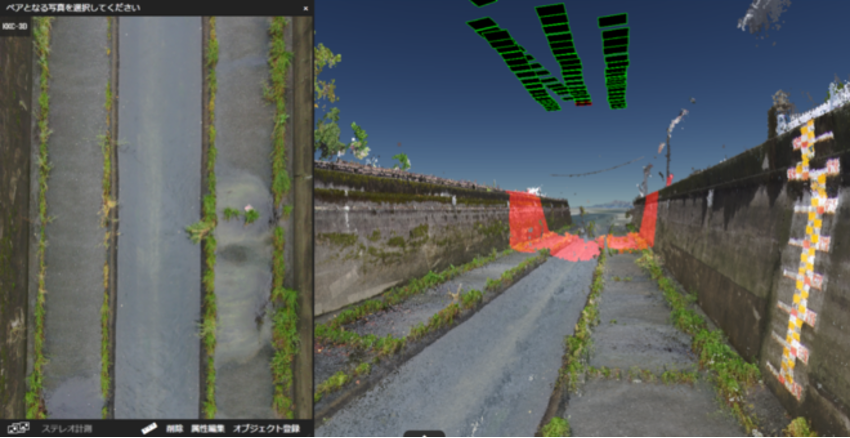
図14 測量データの3次元可視化
e) 航空写真データ
国土地理院の全国最新写真を利用した。このデータは電子国土基本図(オルソ画像)と米国航空宇宙局(NASA)/米国地質調査所(USGS)の地球観測衛星Landsat-8、林野庁などのオルソ画像を組み合わせて地理空間情報として表示するものである。本研究の対象地域では地上画素寸法20㎝の空中写真から作製されたオルソ画像が利用可能であり、その水平位置精度は1.0m以内である。

写真2 国土地理院:地理院タイル「全国最新写真(シームレス)」
(2) データの比較
水平の精度は国土地理院の基盤地図情報数値標高モデル5mDEMが最も精度が高いため、これを基準としてデータの比較を行う。河道断面形状においては、東京都の定期横断測量データが基準となる。ただし同データは断面形状と河口からの距離のみのデータであり、水平方向に対する精度は評価することはできない。
4. 各空間情報の水平誤差に関する検証
(1) 数値標高データ・航空写真の比較
図15は東京都杉並区久我山の神田川付近の数値標高データと航空写真を重ね合わせたものである。白い線は航空データから目視にて、河道部を示したものである。標高が低い部分と河道部が重なっていることから、航空写真の水平精度が一定程度担保されていることがわかる。
一方、図15における橋梁部の標高は他の河道部の標高よりも3m前後高い値を示しており、数値標高データからは、河道部すべてを捉えられないことが確認できる。また1メッシュサイズが5mのデータでは、中小河川に対しては相対的に水平距離が大きいため、ラスタからベクタに変換する手法の構築は困難であると考えられる。
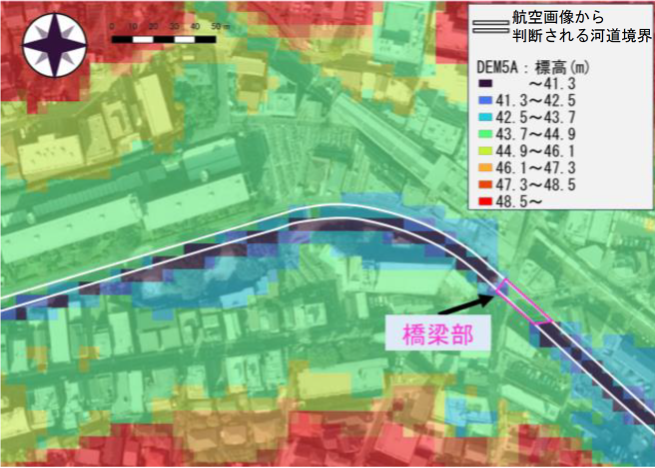
図15 数値標高データと航空写真(東京都杉並区久我山神田川付近)
(2)国土数値情報河川ライン・横断測量データ
<航空写真の比較>
図16は図15と同サイトの国土数値情報河川ラインと横断測量データ測線と航空写真を重ねたものである。図15で水平精度が高いことが示されている航空写真と国土数値情報河川ラインを比較すると最大で約18mの差がみられ、国土数値情報河川ラインの精度の低さがわかる。また、オレンジの破線は河川の中心線と横断測量データ測線が交差 する点をつないだものであるが、同線は河道部から最大11m程度の差があり、横断面データから3次元の河道形状の再現が困難であることがわかる。
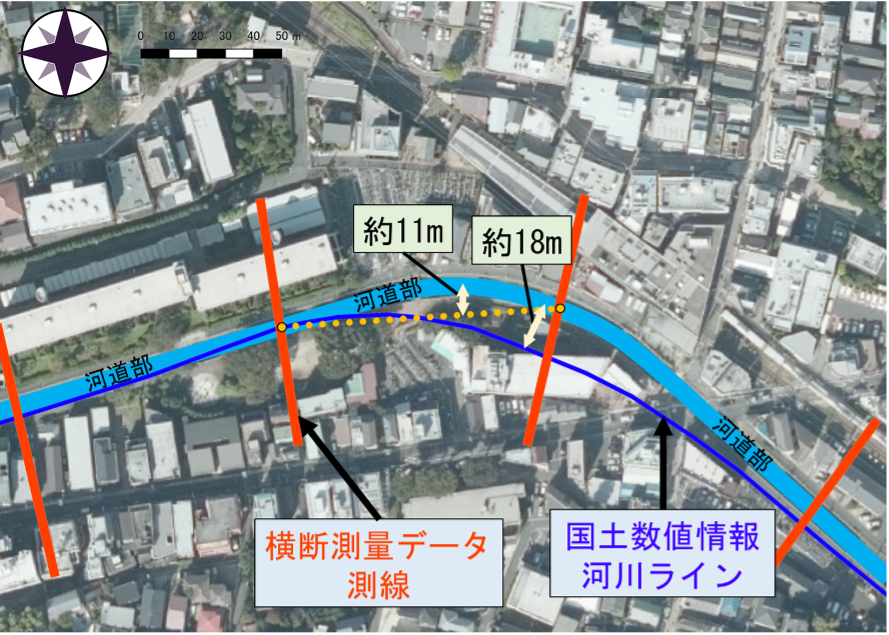
図16 国土数値情報河川ラインと横断測量データ測線と航空写真(東京都杉並区久我山神田川付近)
また、参考として図17に東京都江東区木場付近の国土数値情報河川ラインを示す。実際は河道である箇所が河川ラインとして掲載されていない、また逆に河道ではない場所が河道ラインとして掲載されている箇所が確認される。これらより、ドローンウェイの推定に国土数値情報の河川ラインは本検証の結果からみられる範囲では不適切なデータであるといえる。

図17 国土数値情報河川ラインと航空写真(東京都江東区木場付近)
5. 河川断面データの比較
(1) 3次元点群データから生成した河道横断データ
図18は3次元点群データから生成した、3次元ビューア画像である。画像上部の下流側から、3つの計測断面を設定した。
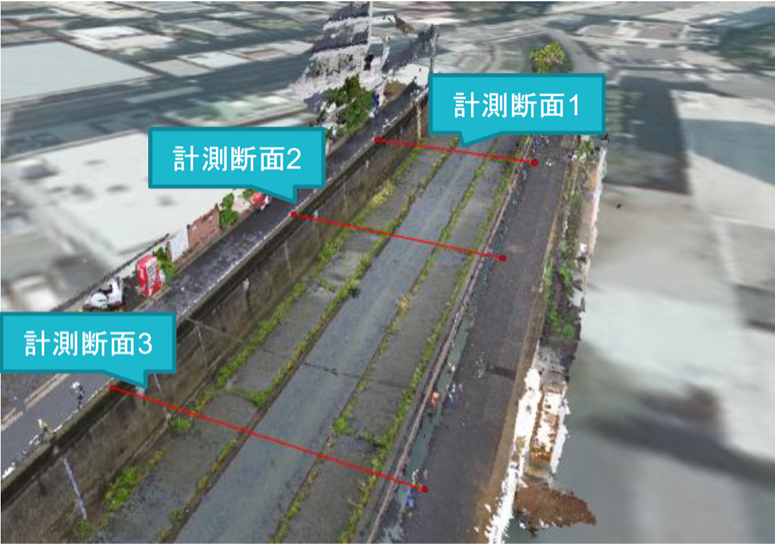
図18 3次元点群データから生成した画像
図19は3次元点群データと航空写真を重ね合わせたものである。航空写真の水平精度は神田川においては比較的高いと考えられ、両データが重なることから3次元点群データの水平精度も高いと考えらえる。
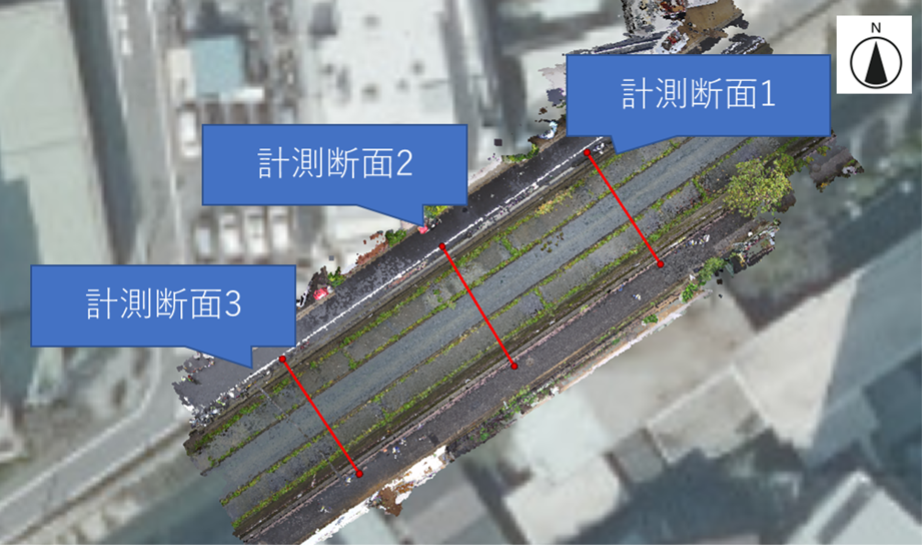
図19 3次元点群データと航空写真
図20は3次元点群データから作成した図18における計測断面2の河道横断データとデータが不連続・欠損がある理由を示している。ここで図20左下の赤丸で囲んだ部分が不連続である理由は左下写真に示した植物が繁茂している影響である。図20右上の黄丸で囲んだ部分のデータ欠損は右下写真に示すように欄干があり、ドローンの空撮では撮影できない角度が存在するためである。しかし河川形状、状況などを把握するために有効な手段であるといえる。

図20 3次元点群データから生成した河道横断データとデータが不連続・欠損がある理由
(2) 3次元点群データと定期横断測量データ
図21は3次元点群データから生成した河道横断データと東京都の定期横断測量データを重ね合わせたものである。ただし定期横断測量データは形状データとしては真値といえるが、水平方向の座標を有しておらず、単純に重ね合わせることができないため、両データとも堤防を基準に中心を揃え、プロットを重ね合わせた。
図20で示す通り、3次元点群データでは植物形状を捉え、また任意高度における川幅の差は約0.2mであり、3次元点群データは空間情報として、十分に利用ができると考えられる。上述のように、定期横断測量データをそのまま3次元データに拡張することは困難であり、その他データと組み合わせる手法の検討が必要である。
以上より、河道の形状を詳細に一度のフライトで計測できるドローン空撮写真を活用した3次元点群データは、他データと比較して有用であるといえる。
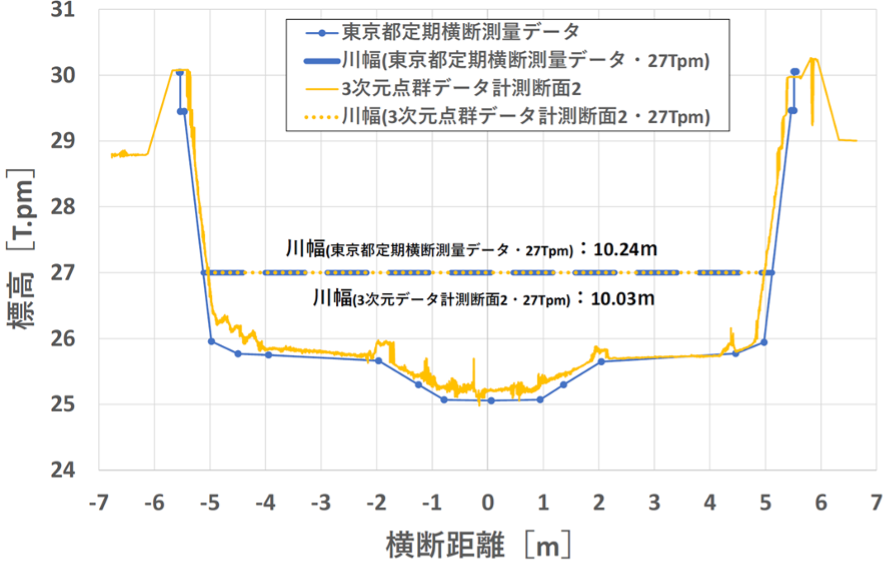
図21 河川横断データの比較(3次元データ・定期横断測量データ)
6. まとめ
都市部におけるドローン物流の実装のため、飛行ルートとしてリスクが少ない河川空間の活用が期待される。しかしドローン物流をビジネス的に成立させるためには、自動・自律飛行が必須条件となる。そこで自動・自律飛行の実現に必要となる河川の空間情報について検証を行った。前掲の表1に検証結果をまとめた。
基盤地図情報は水平誤差が小さいが、5mメッシュサイズであることから中小河川においては河川を表現しきれない。国土数値情報は著者が整理したところ、誤差が18m程度生じる箇所があり、ドローン物流の空間情報として使用に適さないことがわかった。
定期横断データは無論、断面データとしては有用であるが、平面的なデータ補完が困難である。3次元点群データの精度はドローンウェイの空間情報として有用であるが、計測するには多大な費用がかかる。しかし安全性の担保が取れれば、定期横断測量の費用よりも低コストにできる可能性があり、新たな河川管理方法としても期待ができる。
謝辞:本研究の実施にあたり、東京都から河川横断測量データを提供、中野区からはドローン空撮の許可を頂いた。ここに記して謝意を表する。